Posted: 2026-03-20
HexRamp Clutch
This was an interesting concept for a screw drive I had a while back (over a decade ago). It is basically a tapered tri-dog clutch.
I have no idea how realistic this is, but dog clutches are pretty legit so it's coming from a lineage that makes sense.
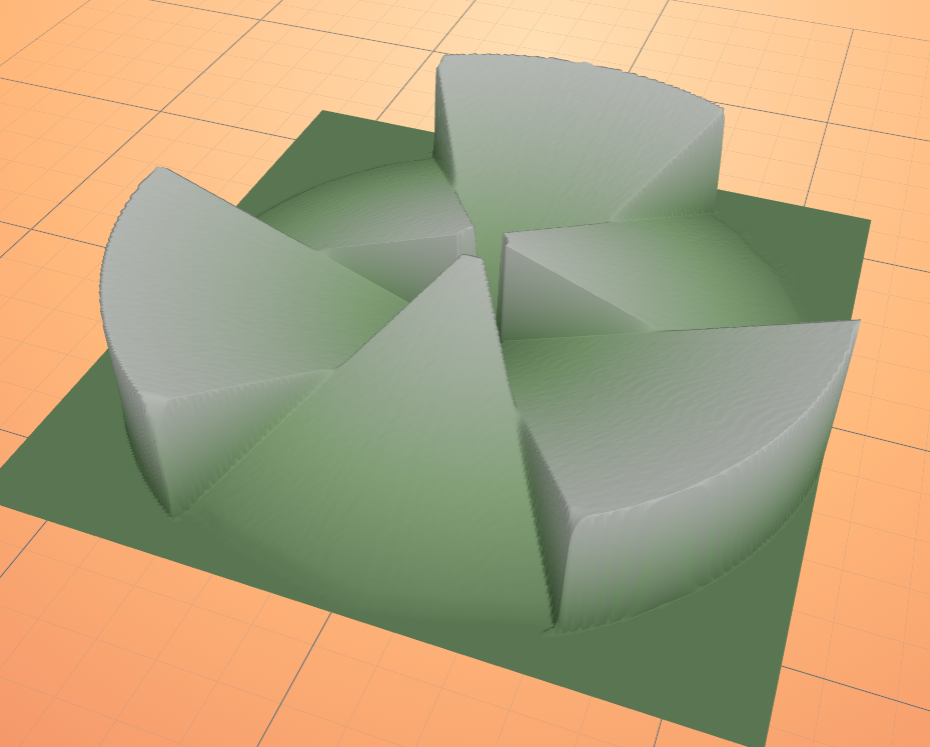
We can render the geometry of this drive as a heightmap:
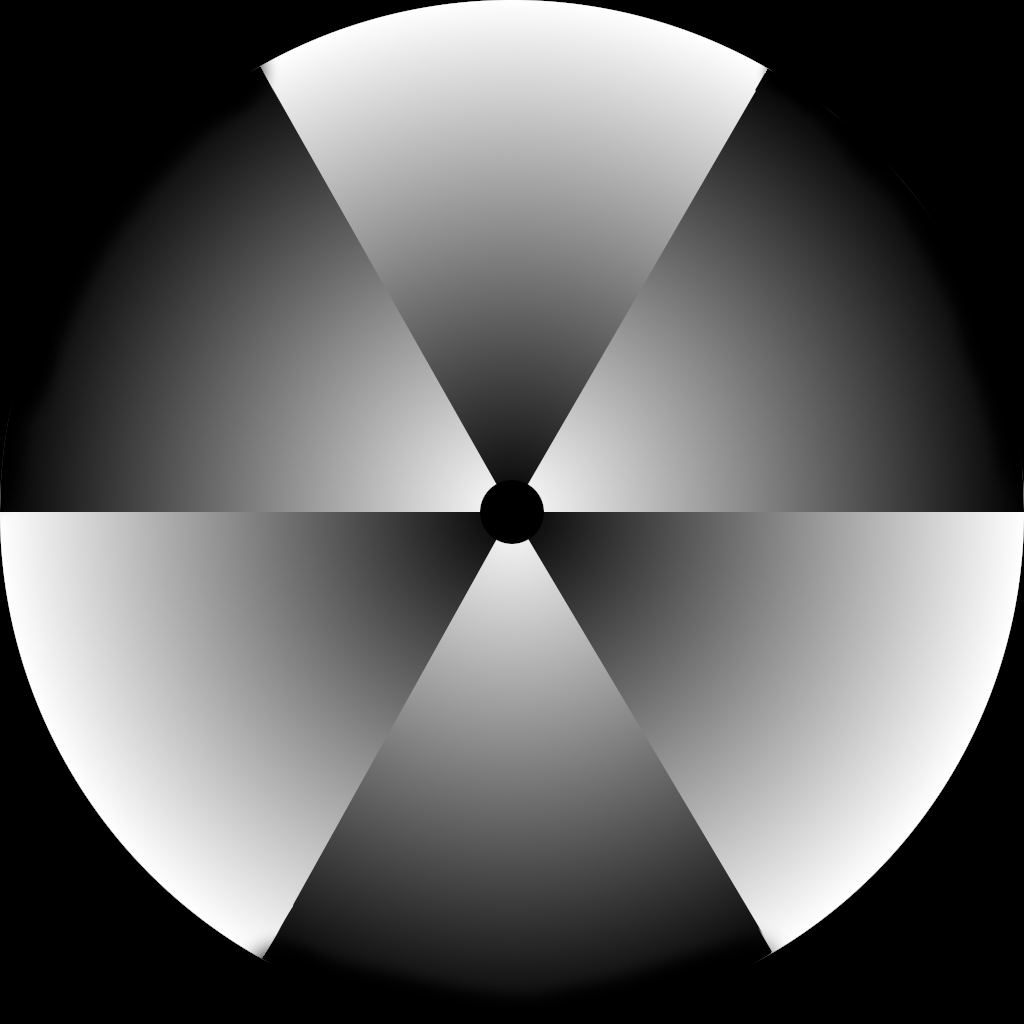
We've taken the discrete torque faces from a dog clutch, but added some interesting twists to make it more viable as a screw drive.
Features:
- Reduced tendency to cam-out under load: because torque is carried directly by solid face contact, the clutch design is much more resistant to cam-out than many common geometries.
- Partly self-centering engagement: the sloped dogs help guide the bit into the recess and reduce the need for precise initial positional or rotational alignment.
- Broad size-family coverage per bit: one bit can drive a wide range of related screw sizes. It isn't literally universal, but in practice the system could cover most realistic needs with very few driver sizes.
- Geometry scales cleanly to higher torque: the same underlying form can be used from small precision fasteners up to larger high-torque applications without needing a fundamentally different drive pattern. As the geometry scales up, it recruits more of the large outer working surfaces.
- Central gap for debris/tolerance: the relieved center reduces the impact of a range of real-world problems, and the fact that all contact surfaces slope towards it means driving pushes debris into it.
- Genderless/self-mating: the geometry for a screw is the same as that of the tool.
- Self-compensation: many common real-world forms of wear, damage, debris, and manufacturing variation are naturally accommodated by the geometry rather than immediately preventing engagement.
- Extreme grab: even partial engagement yields a large face contact area and fairly secure transmission of power.
Drawbacks:
- Complex geometry: manufacturing may be costly and the design may be sensitive to profile tolerances.
- Hard edges: increased wear and damage to tools.
- Dog crossover: there is a small crossover section of each dog which provides no torque, and this must be carefully aligned with the use case.
- Slow/static engagement only: this geometry has little to no ability to engage surfaces in motion.
I could see this credibly working in high-torque bolt applications, though maybe not ones where corrosion is an expected failure mode. You could reasonably have a hexagonal outer perimeter as a backup.
You could round off the top third of the edges of the dogs to allow for easier mating and better self-centering, but once it's locked in it becomes solid.
A friend: "I think the inside should be engineered for mating and the outside for force."
I flat out do not have the time or space to explore this design or anything like it.
If an intrepid experimenter wants to run with it, go for it.
My todo list would have been:
- Create a parametric SCAD file which can vary slope angles, dog crossover points, and centre gap size.
- Start 3D printing super-sized bits and start iterating/experimenting.
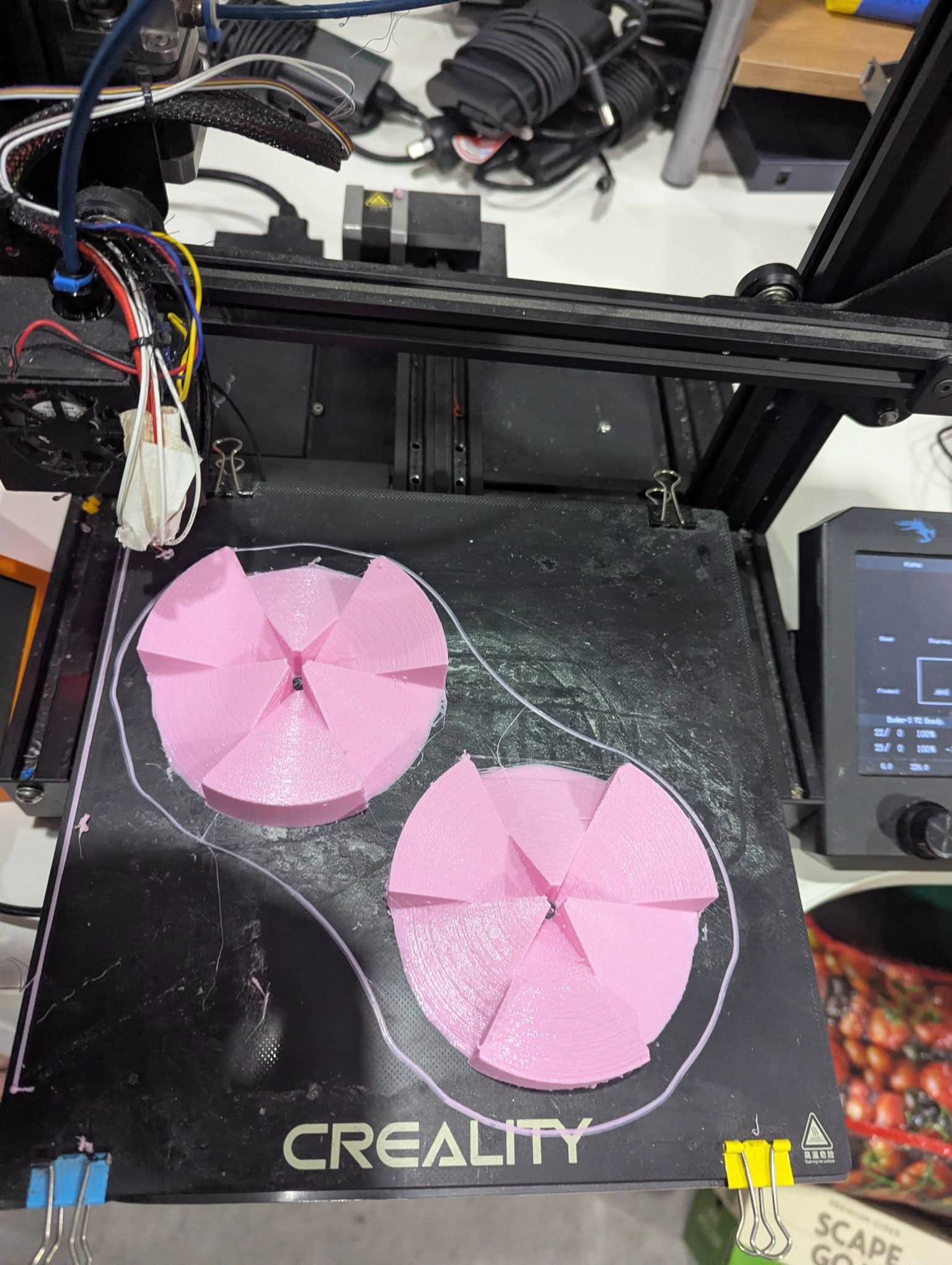
Update
I'm eating my words. I'm crapping out a couple of prototype prints as a demo.
I know this drive is an enbie, but pink was what I had loaded.
I could definitely see this having both a home in industrial/automotive designs (with hex exterior as a backup) or consumer electronics.

Thoughts:
The self centering effect is weaker than expected. The dogs have to mostly line up already. I had been hoping that you could "jiggle" it into place, but it takes more than that.
Mating is intensely grabby. The two pieces are very difficult to pull apart.
Even partial mating is an extremely strong join.
This might be better as a compact, self-mating, high-grab clutch/coupler.
NukeBolt
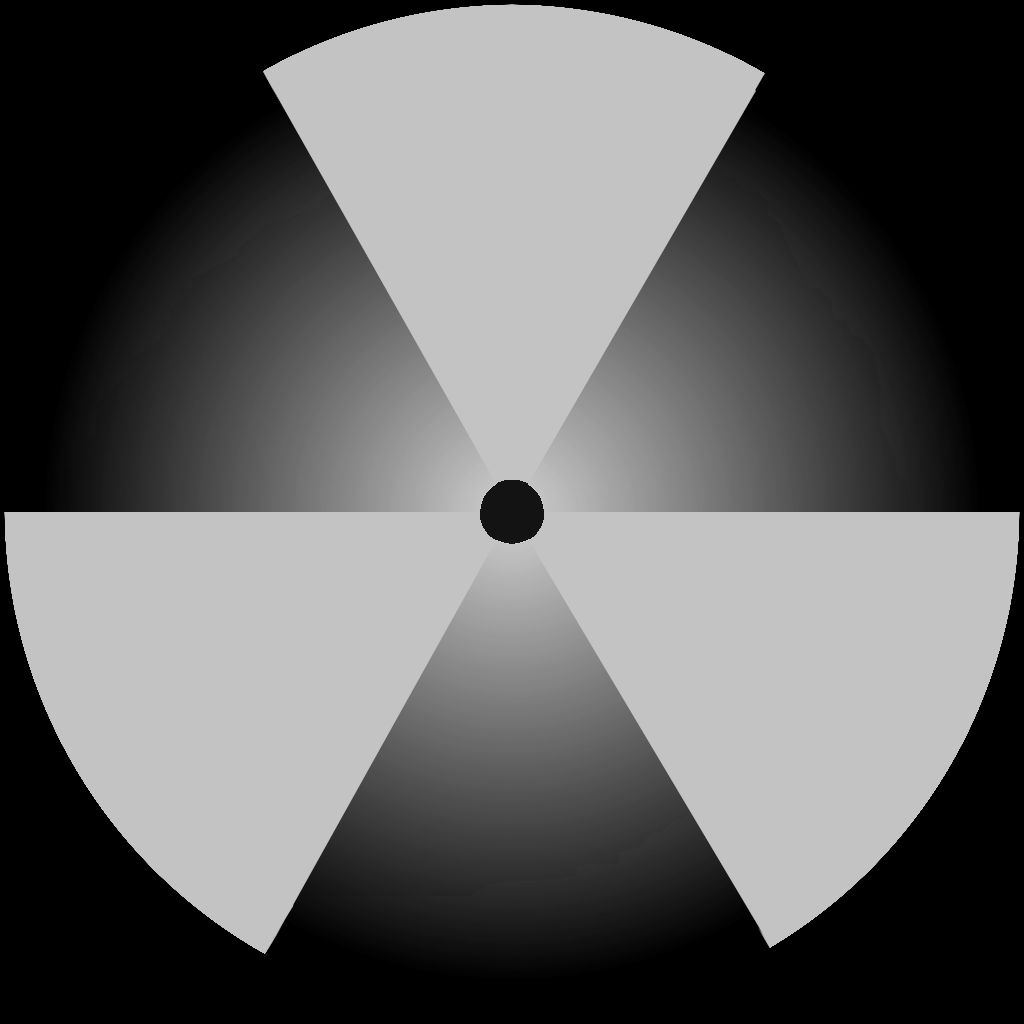
This could be used on the face of a bolt, keeping the hexagon around the outside and allowing for multiple or hybrid ways to drive it.
Features, compared to HexRamp:
- Improved self-centering: still not great, but a significant improvement.
- No dog crossover: torque characteristics are more predictable.
- Multiple drive redundancy: you can still use the outer hex if the face drive is not usable.
Drawbacks:
- Not genderless: this is of course the norm, but it was a cool feature and I'm sad to lose it.
- Low contact area at small sizes: scaling size down means reduced torque transmission from the reduced contact area.
- Lost face material: structural integrity of a bolt possibly compromised by the elaborate added geometry.
Update
We had a suggestion for a real-world use case.
Mating a manual gearbox with a drive spline that has to be millimeter perfect while organising for it to be held up is extremely difficult. The torque it would have to be able to handle is large (~200nM) but the design might genuinely solve a lot of trouble in this situation.
High-torque blind mating is a pretty legitimate niche which could significantly reduce assembly pain and alignment fuss.
🔗 Checkin
Written: 2026-03-20
Written on: 7.5mg olanzapine since 2025-11-11; taken continuously since 2006
Cognitive capacity: improving! - estimate 15% of brain and climbing